算法图解
算法简介
算法只是一组完成任务的指令,任何代码片段都可以视为算法;
二分查找
当数据是有序的时候,使用二分查找可以在对数时间内得到结果;
对数是幂运算的逆运算
大 O 表示法
大 O 表示法用来表示算法运行时间的增速;
注意:它是代表增速;
- O(log n):对数时间
- O(n):线性时间
- O(n * log n)
- O(n^2)
- O(n!)
选择排序
当要在内存中存储多项数据时,需要用到数组或者链表的数据结构;
数组
- 使用数组时,意味着数据在内存必须是连续存放的;因此,当给数组添加元素,导致超过可用连续段的数据时,则需要重新寻找一个新的连续段,并将数据复制过去;
- 一个折中的办法是提前预留一些空间,这样可以避免降低转移的机率,代价是浪费一些空间;即以空间换时间;
- 数组的优点是访问速度快,但插入速度有可能比较慢(当发生转移的时候,或者例如把元素插入在头部的时候);
由于使用虚拟内存映射物理内存,当虚拟内存发生转移的时候,或者有可能物理内存的内容不需要发生转移,只需要更改页表的映射即可?
链表
- 使用的链表的好处则在于当添加新元素时,完全不需要移动旧元素的位置;只需随便找个空位置存放新数据,然后将地址放在上一个元素中即可;
- 链表的优点是插入速度快,但访问速度慢;但如果刚好是要读取所有元素,则链表的效率还是很高的;
数据结构
所谓的数据结构,其实跟内存有很大的关系,当数据存放在内存中的时候,需要有一种地址计算机制,以便找到这些元素;
- 数组通过记住头元素的地址,然后按顺序索引的方式计算出另一个元素的地址;
- 链表通过头元素的地址,顺序向下查找,直到找到所需的元素;
对于二叉树,其实现机制是否让每个元素存放左右两个分支的地址,分别代表某种条件判断真假后的相应分支?待验证;
数组和链表各有其优缺点,因此还可以通过将二者进行结合的方式来存储数据,这样可以兼顾二者的优点;
选择排序
每次遍历一轮,从中挑出最大或者最小的元素,放入一个有序的新列表中;
这种方法的缺点是需要遍历很多轮,导致运行时间为 O(n2);有没有可能只遍历一轮,然后通过建造一个二叉树的方式,来存放遍历结果?在纸上试画了一下,貌似不太行;
递归
- 栈也是一种数据结构,以前没有太明白这句话的意思,但当它和数据存储以及寻址提取的需要进行联系时,它就变得非常容易理解了;对于栈的使用,我们只需要记住栈顶的指针,压栈和出栈的时候,向不同的方向改变栈顶指针的地址即可;
- 函数在返回的时候,需要将原调用者中断指令的地址,发给程序计数器,以便接下来跳转到中断处继续执行原调用者余下的指令,同时,还要改变栈顶的指针,使其指向原调用者的栈桢的顶部;而在一开始时调用函数的时候,除了发生了跳转外,还需要有保存当前指令的地址到栈中,而被调用的函数,会将栈指针(即栈桢的顶部地址)保存到寄存器 %ebp 中;
- 出栈和入栈的动作,在指令的眼里,实际上是通过 add 和 sub 来改变栈顶指针数值大小的动作;通过 add 和 sub 来申请和释放栈空间;
- 栈是一块动态分配的内存空间,用来存储一些临时的数据;栈被划分成多个栈桢,每个栈桢对应一次函数调用,栈桢中存储着该次函数调用的一些临时变量;每个栈桢有一个顶部地址(栈指针)和底部地址(桢指针);当分配新栈桢的时候,原栈桢的顶部地址,就变成了新栈桢的底部地址;CPU 中有两个寄存器 %esp 和 %ebp,分别存储着当前栈的顶部和底部的指针值;
- 当发生函数调用的时候,会将函数参数、返回地址、桢指针值,放在当前栈桢的顶部,然后进入下一个新栈桢;事实上,所谓的栈桢也只是逻辑上存在的,编译器小心的维护桢顶和桢底的地址来实现相应的目的;
- 寄存器的空间是有限的,为了在这有限的空间内,完成每一次的函数运算,它需要内存(虚拟内存)配合,帮忙保存一些状态数据和中间数据,这样 CPU 才可以完成不同函数之间的调用和返回的切换;而栈的使用以及栈顶和栈底指针,可以让代码使用相对地址进行偏移量计算,因为有些变量的长度是动态的,所以并不能在编译的时候直接使用绝对地址;
快速排序
- 分而治之的策略(想起了费曼技巧,将大问题拆解成小问题);
- 欧几里得算法:求两个整数 A 和 B 的最大公约数 GCD(A, B),可以转换为求 A/B 的余数 与 B 的最大公约数,假设 A = B * n + R,则 GCD(A, B) = GCD(B, R);
递归算法
- 定义基线条件;
- 缩小问题规模,直到其符合基线条件;
编写涉及数组的递归函数时,基线条件一般是空数组或只包含一个元素;
快速排序
选择一个基准值,将数组拆分成比它小和比它大的两组,然后对每一组各自进行递归,并合并最后的结果;
- 快速排序平均运算时间为 O(n * logn),最糟糕的情况是 O(n * n),最佳情况是 O(logn);
- 合并排序的运算时间固定为 O(n * logn);表面上看貌似比快速排序更好,但事实上其单次的运算时间比快速排序多,导致最后的总运算时间比快排多;
- 大 O 表示法中所谓的运算时间,其真实含义其实是运算次数;但不同算法的单次运算所需的时间有可能是不同的;
散列表
- 散列函数:无论给这个函数什么样的输入,它都会输出一个数字;
- 散列表的其他名称:散列映射、映射、字典、关联数组;
- 问题:对于 Python 中的字典来说,它如何确保不同的键名的散列数字不会冲突?答:冲突不可避免,解决方法有多种;其中一种方法是在存储位置放置一个链表,来拓展可存储的空间;但链表也不适宜太长,不然会降低搜索性能,当链表很长的时候,需要采用其他方法,甚至重新设计散列表本身的长度,同时确保它的散列结果均匀分布;
- 问题:猜测散列表是一种用空间换时间的方法?
散列函数的实现
- 散列表使用数组来存储数据;既然是数组,意味着其存储空间是连续的;当需要存储的数据个数,超过了预分配的空间时,可能会发生迁移的情况?答:没错,它使用装填因子来触发迁移,一般控制在 0.7;当超过0.7时,就将数组的长度增加为原来的2倍;
- 填装因子:要存储的数据个数 / 数组的长度;填装因子越小,发生冲突的概率就越低;
广度优先搜索
- 解决最短路径问题的算法,一般使用广度优先搜索;使用图来建立数据模型,使用队列建立搜索列表;
- 图由节点和边组成,它用来描述哪些节点与哪些节点之间存在连接;
- 当有了节点和边后,可以通过搜索一个节点所关联的第1级节点,第2级节点…第n节点,来判断一些想要的结果;例如先搜索自己的朋友,再将朋友的朋友也加入搜索的范围;这便是广度优先搜索;(听上去像是一种暴力算法)
- 有向图:节点间的关系是单向的,图中的边会带有箭头;无向图的边则没有箭头;
- 广度优先搜索的运算次数为 O(v+e),其中 v 表示 vertice 节点数,e 表示 edge 边数;
- 树也是一种图,只是这种图比较特殊,它没有往回指的边;
狄克斯特拉算法
广度优先算法可以用来寻找边数最小的路径;狄克斯特拉算法可用来寻找消耗时间最短的路径(相当于给边分配了权重,然后找出总权重值最小的路径)
狄克算法描述
从起点出发,罗列出所有余下节点的权重开销,对于不可达的节点,设定其开销为无穷大;依次遍历开始位置的节点的邻居,计算其到达余下节点的开销(需计入起点到当前节点的历史开销),如有比原开销更短的路径,更新其开销;重复该步骤,直到遍历完所有节点;
- 有权重的图称为加权图,没有权重的图称为非加权图;
- 无向图中,每条边都是一个环,狄克算法只适用于有向无环图;
- 狄克算法有一个基本假设,即已经处理过的节点,没有前往该节点的更短路径,这种假设仅在没有负权重边时才成立;因此狄克算法不能用于处理有负权边的情形;此时需要使用贝尔曼-福德算法;
狄克算法实现
数据结构
- 新建一个子节点散列表,保存每个节点及其邻居(作为节点的属性,并将权重做为属性值);
- 新建一个开销散列表,保存到达当前节点的最短路径开销;
- 新建一个父节点散列表,保存每个节点的最短路径父节点;
- 新建一个节点数组,记录已经处理过的节点;
算法实现
- 遍历所有未处理的节点;
- 计算每一个未处理节点,到达下一个邻居节点的累积路径开销;
- 如果当前节点到达下一个邻居节点的路径开销,比现已知的到达该邻居节点的路径开销更小,则更新开销表中下一个节点的最短路径开销值;
- 遍历完当前节点的所有可达邻居节点后,将当前节点加入已处理列表中;
- 重复第二步,计算下一个未处理节点;
贪婪算法
- 贪婪算法:每步采用局部最优解,以期最终得到全局最优解;虽然最终不一定能得到,但会相当接近;因此,贪婪算法不是完美答案的算法,但是一种简单的算法;
- 旅行商问题:找出最短路径的组合;
- 随便选择一个出发城市
- 选择出发去下一个城市时,选择最近的还没有去的城市;
- 集合覆盖问题:找出覆盖所有州的最小电台集合;
- 从剩余可选电台中,找出覆盖最多未到达州的电台,放入候选列表;
- 重复第一步;
- 判断是否 NP 完全问题的一些潜在迹象
- 涉及所有组合;
- 随着元素数量增加,计算量急剧上升;
- 不能将问题分解成小问题;
- 涉及序列且难以解决(如旅行商问题);
- 涉及集合且难以解决(如电台问题);
- 可转换为集合覆盖问题或旅行商问题;
- 对于 NP 完全问题,最佳的做法是使用近似算法;
- 找出满足球队最佳组合的球员,原理也跟电台问题一样;
动态规划
- 动态规划原理:先解决小问题,再解决大问题;可用来寻找给定约束条件下的最优解;每种动态规划方案都涉及网格,每个单元格都是一个子问题;根据问题不同,计算动态规划方案的公式不同,没有统一的公式,需要根据问题定制化设计;
- 案例:4公斤的背包,偷盗最有价值商品的组合;
- 方法:先找出背包容量只有1公斤、2公斤、3公斤等情况下的最佳组合(即大问题先转换为小问题来解决);然后在4公斤的时候,就可将其转换成当前新选择+余下容量最佳组合的和,来得到最终解;如果新选择的容量和没有大于旧选择的容量和,则以旧选择为准,放弃新选择;
- 如果商品单位不是整件,而是可以部分,例如大米,则动态规划算法不适用,但此时可以使用贪婪算法;
- 动态规划算法的前提是各个选项之间是独立的,不存在相互依赖的关系;如果某些选择之间有依赖关系,则动态规划方法不适用;
- 单词最匹配预测:寻找最大公共子串问题;
- 既然是公共子串,那意味着最低限度也要有一个字符相同,这样才谈得上有公共的部分;
- 当有一个字符相同时,如果前面还有一个相同的字符,则构成了2个相同字符的字串;如果前面的字符不同,则只构成一个相同字符的子串;
- 最长公共子串不一定出现在单词的末尾,它也可以出现在单词的中间;
- 单词最匹配预测:寻找最大公共子序列问题:与寻找最长公共字串的算法略有不同:
- 当存在一个相同字符时,该单元格标注为左边或上边邻居中较大的值加1;
- 当存在不同的字符时,该单元格标注为左边或上边邻居中较大的值;
K最近邻算法
- K最近邻算法即 KNN,全称 K nearest neighbor;
- 当要给某个东西分类时,查看离它最近的3个邻居,如果其他有2个邻居是 A 类物品,则该东西很可能是 A 类物品;
- 如何计算 A 和 B 点的距离?将物品进行特征建模,每个特征做为一个维度,这样物品就可以转换成空间维度中的坐标,然后使用勾股定理计算两点之间的距离;
- KNN 可以用来实现两项基本工作:分类(即分组)和回归(即预测结果);
- 计算相似度除了使用距离来比较,还可以使用余弦相似度来比较,它比较的是角度,而不是距离;当每个人打分的标准不同时,使用余弦相似度会更加适合;
- 余弦相似度与向量的长度无关,而只是方向有关,它的取值在 -1 到 1 之间;当夹角为0度是,相似度为1;当夹角为90度时,相似度为0,当夹角为180度时,相似度为 -1;
- 对于 KNN 算法,挑选合适的分类特征很重要,需要确保这些特征能够准确反应事物的属性,同时又与要解决的问题相关;
- OCR、语音识别、人脸识别都是使用 KNN 算法原理;它从数据集中提取特征,然后根据特征建模,找到分类标准;这样当有新的数据进来时,提取新数据的特征,依据标准对数据进行分类;
- 依据特征统计分类标准的过程,即为训练;
- 朴素贝叶斯分类器 Naive Bayes Classifier;
- 朴素贝叶斯常用于文本分类领域;文本分类一般以词频为特征,判断文件所属的类型(例如垃圾邮件、政治、体育、合法等);
接下来如何做
树
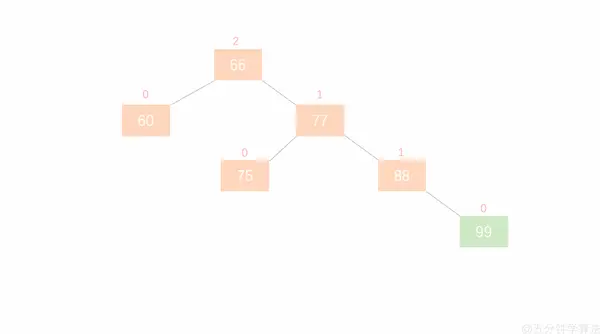
有序数组的优点是查找非常快,平均都是 O(logN),但它的缺点是插入和删除非常慢,平均都是 O(n);为了克服这种缺点,引入了二叉查找树的数组结构,它的特点是每个节点都两个子节点,左边节点存储比它小的值,右边节点存储比它大的值;对于二叉树,它的平均查找、插入、删除的时间都是 O(logN)(当然,前提是这是一棵平衡的二叉树,如果不平衡,而性能达不到 O(logN);
- 数据库和文件系统常使用 B 树来存储数据;它适用于读写相对大的数据块,因为 B 树的节点支持一定的范围的关键字,刚好跟磁盘读写单元块相对应,所以读写效率比其他树结构来得高;
- 其他常用的树结构还包括:红黑树、伸展树、B+树、B* 树等;
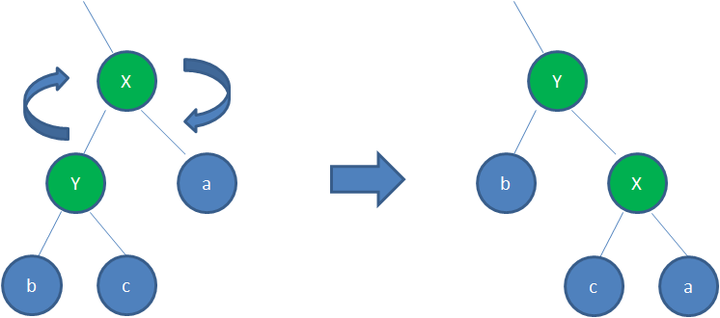
平衡二叉树(AVL树)
- 每个节点最多允许拥有2个子节点;
- 左子节点的值小于当前节点,右了节点的值大于当前节点;
- 左右两边的节点层级差不大于1(如何做到?通过对树进行左旋或者右旋来实现)
左旋
右旋

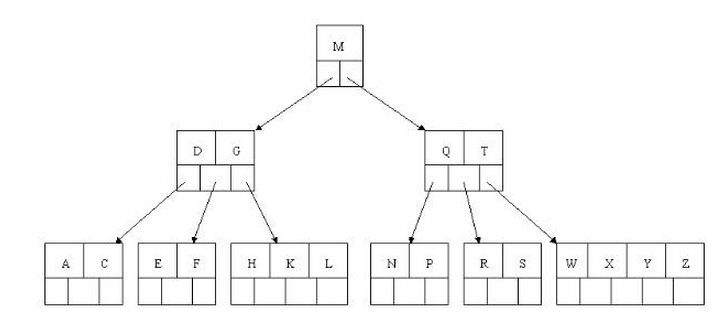
B 树
一种自平衡的树(不二叉,而是多叉),能够保持数据有序;
- B 树的每个节点可以拥有2个以上的子节点;
- 子节点的数量范围预先定义好(例如 2-4 B树,表示允许 2-4个子节点)
- 当发生数据插入或删除时,如果超过范围,会触发内部节点的拆分或合并;拆分或合并后都需要满足左边节点本身比左边节点大,比右边节点小的排序规则;
- 由于有一定的范围,所以不需频繁的调整以保持平衡;
- 但缺点是节点可能没有完全填充,会浪费一定的空间(以空间换时间);
- 节点除了存储关键字外,还需要存储子节点的地址;二者的数量差不多均分;
查找示例
查找字母 E,则依次比较根节点M,然后二级节点DG,盱 D<E<G,所以沿中路分支,在三级节点查到 E;
插入示例
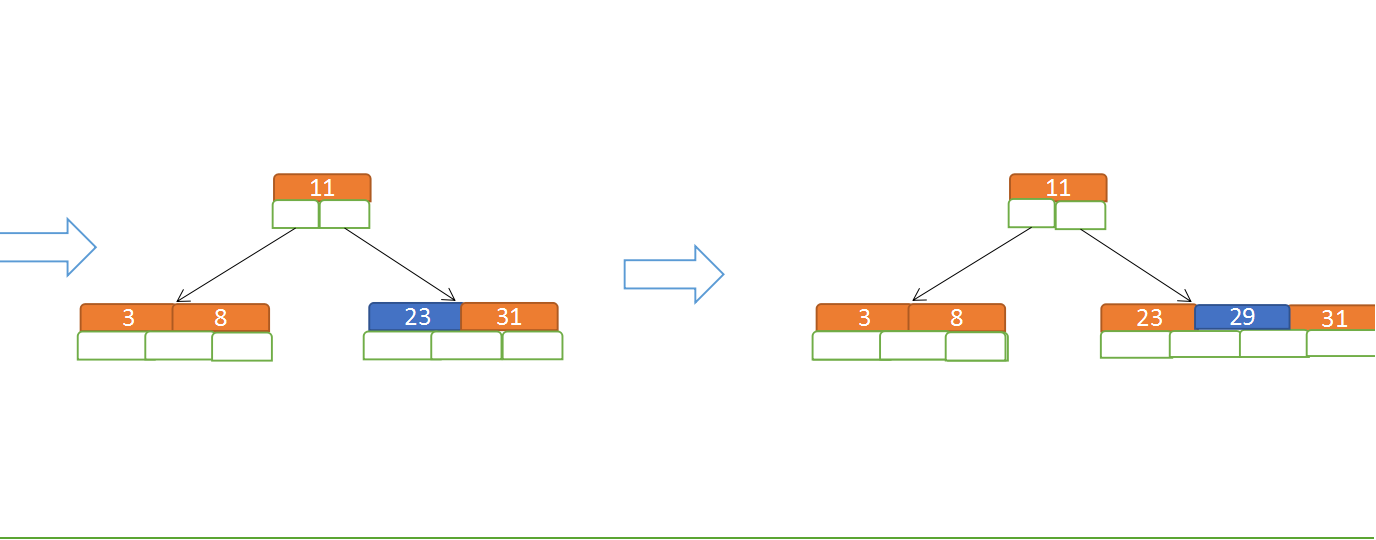
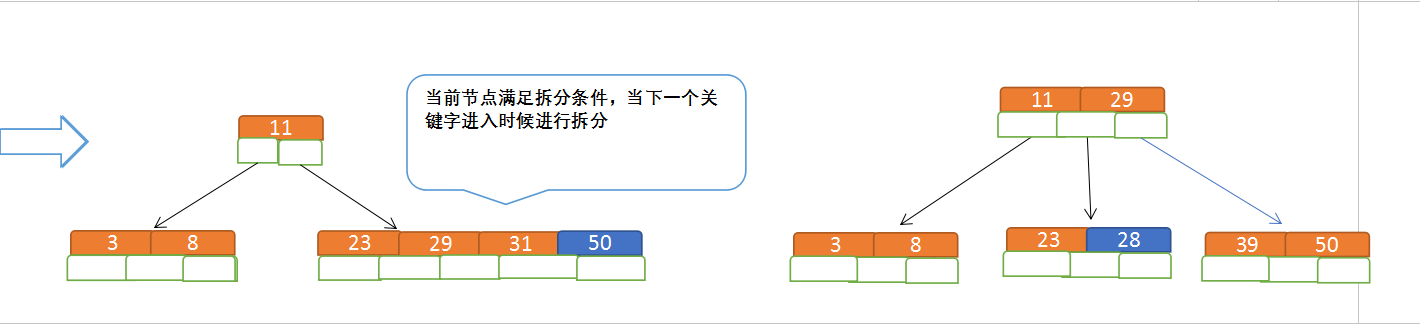
假设要构建的为 5 阶树,则当关键字必须<=(5-1)即小于等于4,意思是当关键字数超过4时,需要进行节点拆分;现在模拟插入3、8、31、11、23、29、50、28
先插入 3、8、31、11
再插入23、29
再插入50、28
删除示例
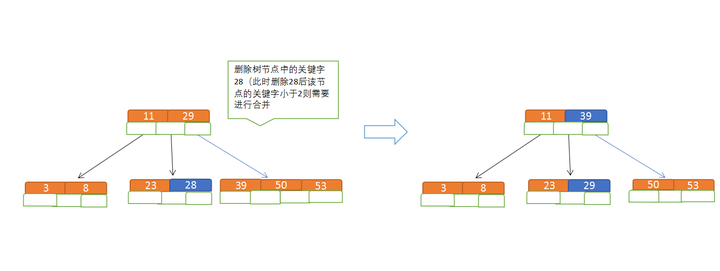
假设为5路查找树,由于 m = 5,因此关键字数必须 >= (ceil(5/2) -1) 为 2,所以当关键字小于2时,会触发合并;
删除数字 28
B+树
B 树的升级版,由于更充分的利用了节点的空间,使得其查询速度更快;
与 B 树的区别如下:
- 非叶子节点不再保存关键字,只保存索引值和子节点地址;这样每个节点可保存的数据就增加了很多;
- 查找时,根据索引值判断应选择的子节点分支;
- 由于每个子节点可保存的内容变多,导致树的高度层级变少,所以查询性能更好;
- 所有数据都存储在叶子节点上;而且由于是有序的,所以遍历全表的时候,只需扫描所有叶子节点即可,不用遍历非叶子节点;方便数据库做全表扫描;
- 同时在查询大小区间的数据时,也更方便;
B* 树
B* 树是 B+ 树的变种,它与 B+ 树的区别有两点:
- 当某个节点满了后,它不会马上拆分,而是会先检查一下兄弟节点是否已满;
- 若未满,则向兄弟节点转移元素;
- 若已满,则进行拆分;从自身和兄弟节点中,各拿出三分一的元素来组成一个新的节点;
- B* 树每个节点存有兄弟节点的指针;
由于有向兄弟节点转移元素的功能,使得 B* 树的拆分频率比 B+ 树要小一些;
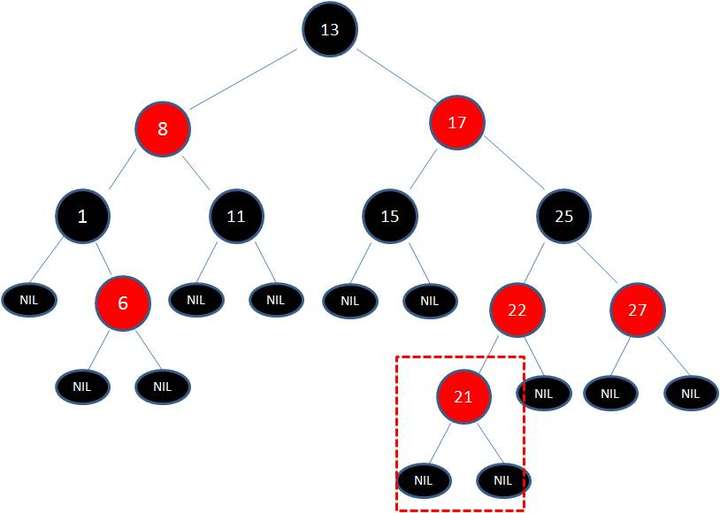
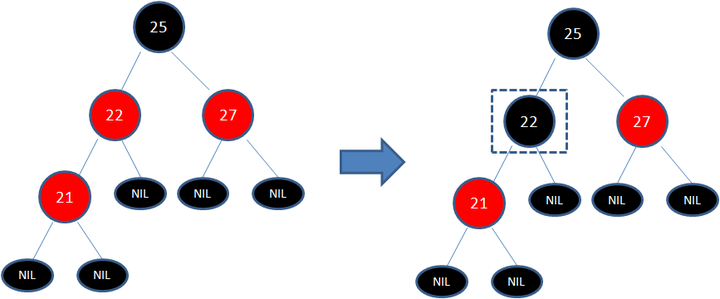
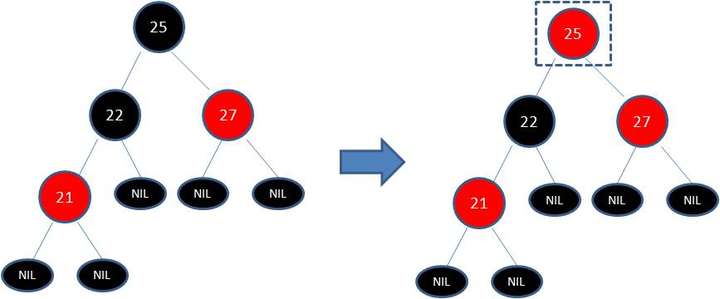
红黑树
红黑树是另外一种自平衡的二叉树;
- AVL 树的约束是高度差不大于1,这样会导致插入或删除时频繁发生旋转;红黑树则放松了这方面的限制,它通过引入颜色属性,并增加一些与颜色相关的约束条件来控制平衡;
- 红黑树通过牺牲了部分平衡性,来换取插入/删除操作时更少的旋转操作,从而在整体上性能优于 AVL 树;
- 约束条件:
- 根节点必须是黑色的;
- 所有 NIL 叶子节点也都是黑色的;
- 每个红色节点必须有两个黑色的子节点;
- 从叶子节点到根节点的路径上,不能有两个连续的红色节点;
- 任一节点到其每个叶子的所有路径都包含相同数目的黑色节点;
- 虽然红黑树的插入/删除触发的旋转不如AVL频繁,但是一旦触发,其引起的颜色变更和旋转要复杂得多,但操作时间仍可控制在 O(log n) 次;
- 字典据说主要使用红黑树来实现,好奇是如何做的?
变色
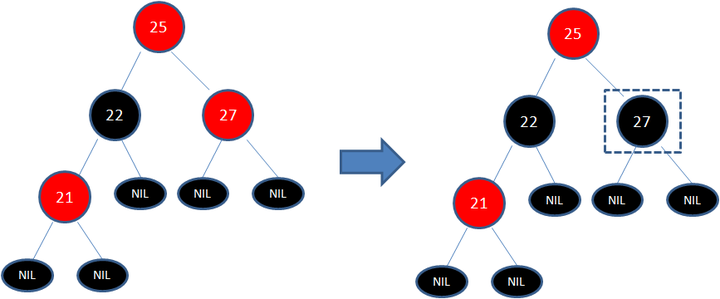
左旋
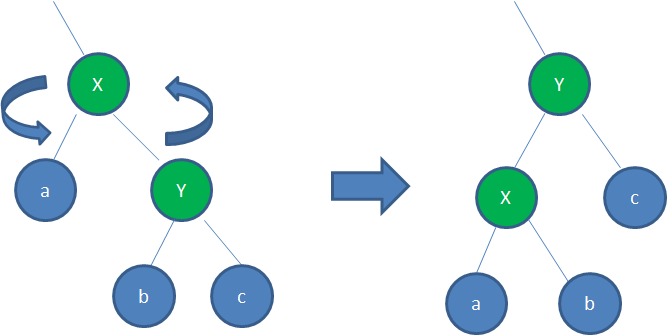
右旋
伸展树
- 伸展树也是一种自平衡的二叉树;它基于理念:越是被频繁访问的元素,应该离根节点越近,以便提高查找速度;
- 因此,每次查找后,伸展树会进行一系列旋转操作,让被访问节点更靠近根节点;
- 优点:性能不输于平衡树;存储空间小(因为不需要存储保持平衡的额外信息);
- 缺点:在极端情况下会变成链;在多线程的情况下会变得很复杂;
反向索引
- 正向索引是通过键找到值,反向索引是对值进行排序,然后根据值找到键;
- 它可用来做为网页搜索引擎的算法;对搜索的关键字进行反向索引,当用户输入关键字后,根据关键字索引,查找到包含这些关键字的网页;
傅里叶变换
- 作用类比:
- 给它一杯冰沙,它可以告诉我们其中包含哪些成分;
- 给它一首歌曲,它可以告诉我们其中包含哪些频率;
- 傅里叶变换很适合用来对各种信号进行处理,包含音乐、图片、各种波等;
并行算法
并行算法的设计
并行算法的设计需要考虑两个问题
- 并行性管理:如何合并并行计算的结果;
- 负载均衡:确保任务分配相对均匀,各自的任务完成时间大致相同;
MapReduce
一种分布式算法,可以将计算任务分配到多台计算机上分布计算;
- Map 函数(映射):接受一个数组,对里面的每个元素进行相同的处理;
- Reduce 函数(累计):将每次的处理结果进行累计;
布隆过滤器
可用于判断某个元素是否存在于某个巨大的集合中;
- 优点:需要的存储空间比散列表小很多;
- 缺点:它可能会出现错报(伪阳性,false positive),但不会漏报(伪阴性,false negative);
- 原理:初始化一个长度为 m 的位数组,挑选 k 个哈希函数,用来将输入值转换成 k 个位结果;
- 查询过程:判断哈希函数生成的每个位结果,在 m 数组中相应的位上的值是否为 1,若都为 1,则表示值可能存在于集合中;若有一个为 0,则表示值在集合中一定不存在;
- 写入过程:根据哈希函数生成的每个位结果,将 m 数组中相应的位上的值置为 1;
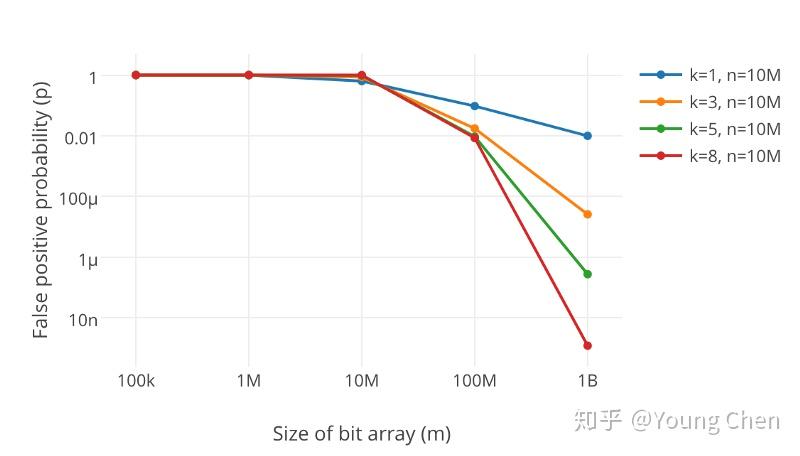
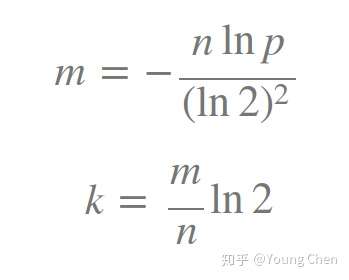
哈希函数的数量 k,以及数组的长度 m 会涉及误报率 p;m 越大,k 越小,则 p 越小;m 越小,k 越大,则 p 越大;
k/m/p 的关系
k/m 计算公式
感觉布隆过滤器很像 bitmap,差别在于 bitmap 适用于连续型的数据,因此不需要哈希函数;而布隆则适用于任意类型的数据;
HyperLogLog
HyperLogLog 主要用于基数计数的场景;
- 基数计数(Distinct Value):统计一个集合中不重复的元素个数;例如网站的日活跃 UV 统计、某日搜索的关键词个数统计等;常用方法是设计一个散列表,每次新来的一个元素,判断是否在集合中;若不在则新增,若存在则增加计数;这种方法准确率100%,但需要完整的内存存储空间来存放集合中的每一个元素;
- 优点:相比散列表, HLL 非常节省内存;
- 缺点:它是一种概率算法,有一定的概率会误报;但结果基本准确;
例如对于 10^9 的基数,只需 1.5KB 的内存,即可实现 2% 标准差的统计结果;
问题模拟
数据库中有某日访问某个页面的访问记录,记录的字段包含有用户名,部分用户存在多次访问该页面的情况,求:共有多少个不重复的用户在该日访问了该页面?
问题解法
暴力法
计算出每条记录中的用户名的哈希值;
从所有的哈希值寻找最大的连续0的个数,假设为 k;
根据 k 算得该页面不重复的访问用户数量约为 2^(k+1)
这个解法并不准确,不能应对极端事件,例如当1000万次访问全部是由一个用户请求的时候;
分桶法
- 将每个哈希值分成两段,第一段做为桶的编号,第二段用来计算k(即连续0的个数)
- 假设分成了10000个桶,最后 k 取这10000个的平均值;
- 假设1000万次访问全部是一名用户,则所有的记录都会被分成到一个桶,剩下的9999个桶的 k 值都为 0,因此计算出来的 k 的平均值就会变小很多;桶数越大,k 值的偏差越小;
- 基数估计 = 桶数 * (2 ^ 平均 k)
m 代表桶数;
R 代表均值 k;
constant 代表常数,用来修正(其计算公式附后);
分桶法改进
在分桶法中,k 使用平均值,但平均值的缺点是容易受到一些极端数值的影响;为了避免这个缺点,改为使用调和平均法,来求取 k 值;
Hn 代表 2^(调和平均 k 值);
xi 代表单次的基数估计值,它等于 2^(ki + 1);
n 代表总的桶数 ;
改进后的基数统计公式如下:
当数据量很小的时候,上面的公式计算出来的结果偏差会比较大,因此需要引入一个条件判断,当数据量小于某个临界时,使用其他计算方式
1 | |
桶数 m 的选择:
根据想要控制达到的相对标准差值 RSD(relative standard deviation)来计算:
常数 constant 的选择:
m 表示桶数
1 | |
SHA 算法
在创建散列表时,里面会用到某种散列函数,它会将一个键名,转成一个索引,从而能够在 O(1) 的时间内,找到值存储的位置;
用途
- 比较文件:使用同一个散列函数,计算两个文件的散列值;如果值相同,则意味着这两个文件相同;
- 检查密码:服务器不存储用户的密码,而是存储其密码的散列值,这样即使服务器上面的密码被泄露,也不会导致用户的密码暴露;
SHA 算法包括 SHA-0, SHA-1, SHA-2, SHA-3,前两个被证明有缺陷,一般使用后两个;
局部敏感的散列算法
散列函数默认是局部不敏感的,即输入值即使只有细微的差异,输出值都会有巨大的不同;但有时候也需要局部敏感的散列函数,用来判断两个事物是否非常相似;
用途
- Google 判断某个网页是否已经收集;
- 判断论文是否抄袭;
- 判断用户上传的文档或图书是否侵犯了版权;
Diffie-Hellman 密钥交换
即公钥和私钥,发信人使用公钥进行加密;加密后的内容只有私钥持有者才能打开;
Diffie-Hellman 算法的替代者为 RSA 算法;
线性规划
用途:在给定约束条件下最大限度的改善指定的指标;
例子
- 有限的原材料,生产两种产品,如何获得利润最大化;
- 有限的时间和资金,在两个不同的州分别获取选票,如果将选票数量最大化;
所有的图算法都可以使用线性规划来实现,图问题只是其中一个子集;
线性规划使用 Simplex 算法;